
 Collaborative Robot
Collaborative Robot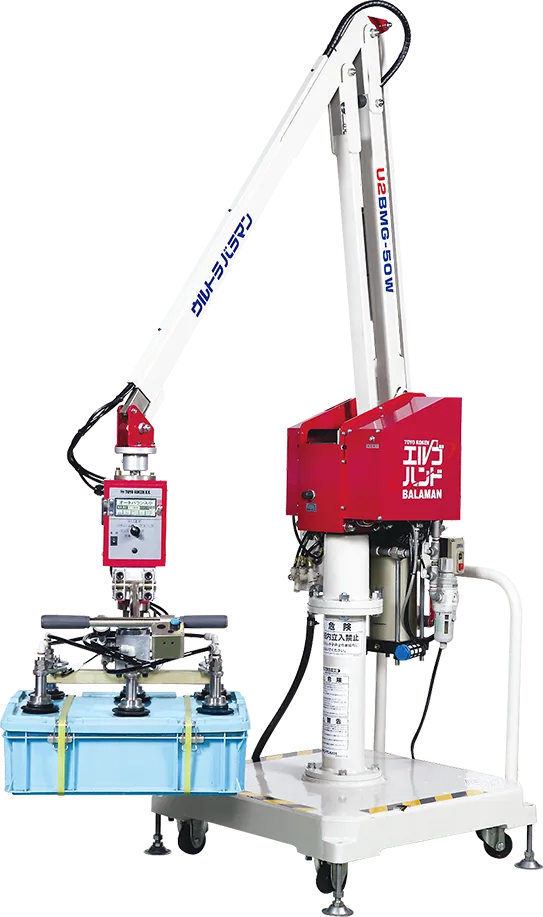 ULTRA BALAMAN
ULTRA BALAMAN
※「COLLABO SYSTEM」および「コラボシステム」はトーヨーコーケン株式会社の登録商標です
重量物はウルトラバラマンが支えて協働ロボットの可搬重量不足をカバー
産業用ロボットに比べ省スペース・省コストを実現
現場の自動化に協働ロボットを使いたい。このようなニーズが急速に高まっています。
しかしながら、いざ導入を検討してみると可搬重量が足りない、アームが届かないといった課題が浮き彫りになることがあります。
その際は、協働ロボットにウルトラバラマンを組み合わせたCOLLABO SYSTEM(コラボシステム)で解決する可能性が大いにあります。
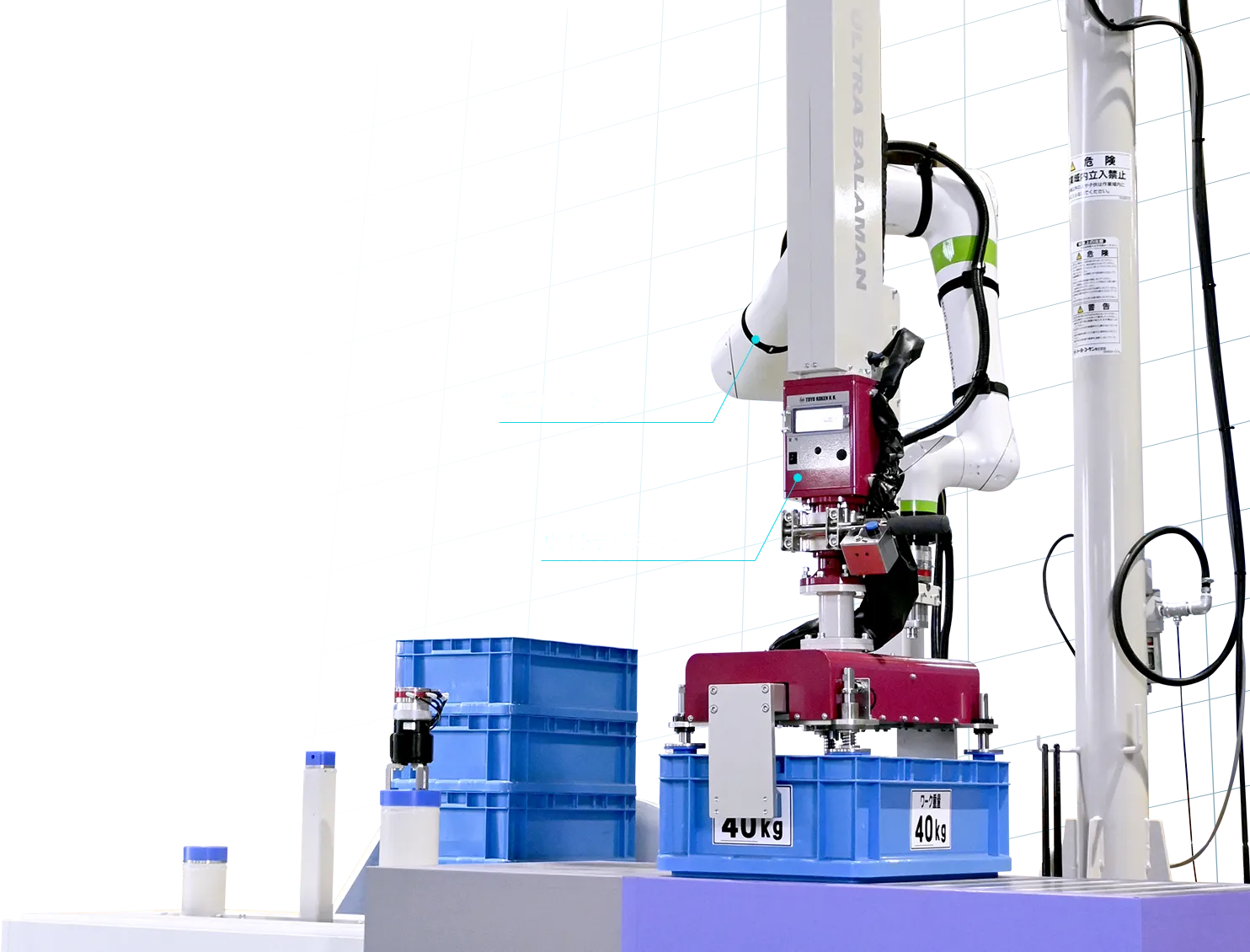
COLLABORATION SYSTEMの動作の様子
コラボシステムを
オススメする3つの理由
- 1
シンプルな役割分担
搬送物の重量負担:ウルトラバラマン
道先の案内:協働ロボット - 2
様々なワークに対応
箱ものから部品など様々なワークに対応
重量:最大150kg(アタッチメント含) - 3
実績多数
自動車や空調機器など様ざまな製造現場で稼働中
コラボシステムのメリット
-
産業用ロボット同様に省人化を実現
(ただしタクトタイムはそれほどではない) -

産業用ロボットよりも省スペース
一方で、ハンドを協働ロボットよりも
遠く・高く配置可能 -

産業用ロボットよりも
メンテナンスやティーチングが楽 -

産業用ロボットよりも低出力で、
リスク管理上、非常に有効 -

協働ロボットがダウンしても
ウルトラバラマンは人手で操作できる
ため迅速な応急対応が可能※ -

ロボットとの通信不要バランサはオートバランス機能による自動制御のため、
ロボットの動作に付いていくだけ
インターロックは協働ロボット側で完結するシンプルなシステム
※協働ロボットがバラマンと同じ床上移動式台座に設置している場合、非常時には、簡単にシステム一式を動かすことが可能になる
よくあるご質問
-
本製品は最終的に納品されるシステムの安全を保証するものではありません。
協働ロボットを用いたシステムでは、システム全体の危険性や有害性を調査して低減措置を講じる必要があります。
そのため安全柵の有無に関しては、リスクアセスメントを行い判断する必要があります。
リスク低減策には、安全柵だけではなく、部分的な制限や表示による注意喚起も含まれ、人が介在するエリアは安全柵なしでも、ロボットやバランサから退避できるスペースの必要性や、搬送物やアームとの衝突を避けるためのレイアウトや動線の工夫も重要になります。 -
ウルトラバラマンを運転する際、協働ロボットとの間で信号のやり取りは基本的に不要です。ウルトラバラマンのオートバランス制御により、ワークの地切りから空中搬送まで、重量を検知しながら常にバランスモードを維持します。これにより、協働ロボットの座標移動のみでワークの移動(地切り接地も含む)が可能です。ウルトラバラマンは何の入力がなくても協働ロボットが動けばそれに追従します。
また、ウルトラバラマン先端のアタッチメントは、ウルトラバラマンを経由せず、協働ロボット側で直接コントロールできます。このため、制御の面から見ると、ウルトラバラマン先端のアタッチメントを協働ロボットのエンドエフェクターと見なして簡単に扱うことができます。
さらに、ウルトラバラマンは状態を信号として出力できるため、上位コントローラ(協働ロボットやPLCなど)で安全管理を一本化し、シンプルなシステム構造を実現します。
-
ツールチェンジャーを用いた方法やクランプ式、フランジ取付などさまざまな実績がございます。
-
- ご提案に向けてお客様の状況をヒアリング
- 協働ロボットとウルトラバラマンを組み合わせたレイアウトを検討
- ワークをハンドリングするアタッチメントの設計製作範囲を決定
※弊社で設計製作する場合は、SIer様よりアタッチメントの仕様書をご提供ください。
-
ウルトラバラマンの検証機を用いて実機検証が可能です。まずはお気軽にお問い合わせください!
(協働ロボットはお客様で用意ください。)


お問い合わせ
TEL:03-5857-3161
コラボシステム担当まで